
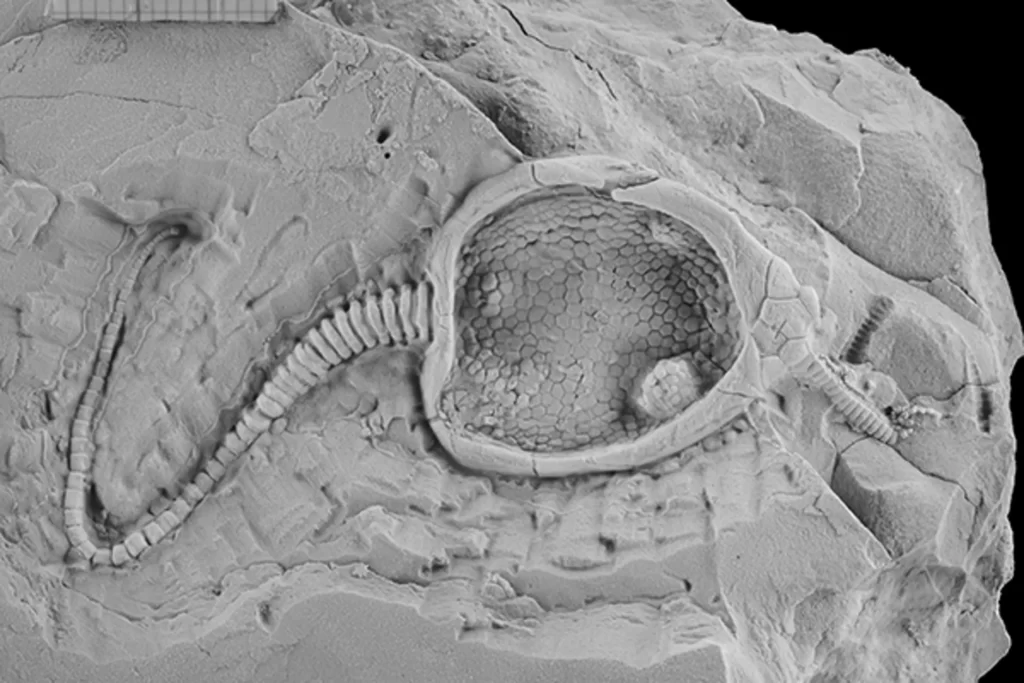
Naukowcy z Wydziału Inżynierii Mechanicznej Uniwersytetu Carnegie Mellon, we współpracy z paleontologami z Hiszpanii i Polski, wykorzystali dowody kopalne do skonstruowania miękkiej, automatycznej repliki pleurocystitids, organizmu morskiego, który istniał prawie 450 milionów lat temu i jest uważany za jeden z pierwszych szkarłupni zdolnych do poruszania się za pomocą muskularnego wypustka.
Wyniki badania, opublikowane w listopadzie w Proceedings of the National Academy of Science (PNAS) , mają na celu poszerzenie współczesnej perspektywy projektowania i ruchu zwierząt poprzez wprowadzenie nowego kierunku studiów – paleobioniki – mającego na celu wykorzystanie softbotyki, robotyki z elastyczną elektroniką i miękkich materiałów, aby zrozumieć czynniki biomechaniczne, które napędzały ewolucję przy użyciu wymarłych organizmów.
„Softbotyka to kolejne podejście do informowania nauki za pomocą miękkich materiałów do konstruowania elastycznych kończyn i przydatków robotów. Wiele podstawowych zasad biologii i natury można w pełni wyjaśnić dopiero, gdy spojrzymy wstecz na ewolucyjny harmonogram ewolucji zwierząt. Budujemy analogi robotów do zbadać, jak zmienił się sposób poruszania się” – powiedziała Carmel Majidi, główna autorka i profesor inżynierii mechanicznej na Uniwersytecie Carnegie Mellon.
Ponieważ czas spędzony przez człowieka na Ziemi stanowi zaledwie 0,007% historii planety, współczesne królestwo zwierząt, które wpływa na zrozumienie ewolucji i inspiruje dzisiejsze systemy mechaniczne, to tylko ułamek wszystkich stworzeń, które istniały w historii.
Wykorzystując dowody kopalne do opracowania projektu oraz kombinację elementów drukowanych w 3D i polimerów w celu naśladowania elastycznej struktury kolumnowej ruchomego wyrostka, zespół wykazał, że pleurocystytydy prawdopodobnie były w stanie poruszać się po dnie morskim za pomocą muskularnej łodygi, która popychała zwierzę do przodu. Pomimo braku współczesnego odpowiednika (od tego czasu szkarłupnie ewoluowały, obejmując współczesne rozgwiazdy i jeżowce), pleurocystitids wzbudziły zainteresowanie paleontologów ze względu na ich kluczową rolę w ewolucji szkarłupni.
Zespół ustalił, że szerokie, zamaszyste ruchy były prawdopodobnie najskuteczniejsze i że zwiększenie długości znacznie zwiększało prędkość zwierząt, nie zmuszając ich do zużywania większej ilości energii.
„Badacze ze społeczności robotyki inspirowanej biologią muszą wybierać ważne cechy, które warto przejąć od organizmów” – wyjaśnił Richard Desatnik.
„Zasadniczo musimy wybrać dobre strategie poruszania się, aby nasze roboty mogły się poruszać. Na przykład, czy robot rozgwiazda naprawdę musiałby używać 5 kończyn do poruszania się, czy też moglibyśmy znaleźć lepszą strategię?” dodał Zach Patterson, absolwent CMU.
Teraz, gdy zespół wykazał, że może wykorzystać Softbotics do konstruowania wymarłych organizmów, ma nadzieję zbadać inne zwierzęta, na przykład pierwszy organizm, który potrafił podróżować z morza na ląd – czego nie można badać w ten sam sposób przy użyciu konwencjonalnego robota i sprzętu komputerowego.
„Tworzenie nowego życia z czegoś, co istniało prawie 500 milionów lat temu, samo w sobie jest ekscytujące, ale w tym przełomie naprawdę ekscytuje nas to, jak wiele będziemy mogli się z niego nauczyć” – powiedział Phil LeDuc, współautor i profesor inżynierii mechanicznej na Uniwersytecie Carnegie Mellon. „Nie patrzymy tylko na skamieniałości w ziemi, staramy się lepiej zrozumieć życie poprzez współpracę ze wspaniałymi paleontologami”.
Dodatkowi współpracownicy to Przemysław Gorzelak z Instytutu Paleobiologii Polskiej Akademii Nauk i Samuel Zamora z Hiszpańskiego Instytutu Geologiczno-Górniczego.
Żródło: materiały College of Engineering & Carnegie Mellon University, zdjęcia w tekście: Carnegie Mellon University (2)



Zostaw komentarz
You must be logged in to post a comment.