
Robotycy z Uniwersytetu Technologicznego w Tallinie (TalTech) opracowali nową klasę bioinspirowanych stóp, które znacząco zwiększają mobilność robotów w trudnym terenie, takim jak błoto i mokry śnieg. Odkrycia opublikowane w Bioinspiration & Biomimetics mogą rozszerzyć możliwości robotów, umożliwiając im poruszanie się w złożonym terenie naturalnym w celu prowadzenia monitoringu środowiskowego, pomocy w rolnictwie i udziału w reagowaniu na katastrofy.
Lokomocja robotów na nogach była badana od dziesięcioleci, a roboty na nogach stają się stopniowo bardziej energooszczędne i wszechstronne. Dostosowanie sposobu chodzenia do zmieniającego się terenu pozwala robotom poruszać się po terenach o zmiennych właściwościach, jednak niektóre rodzaje naturalnego terenu pozostały niezdobyte.
Błotniste i śliskie tereny należą do najtrudniejszych do przebycia dla robotów i zwierząt, w tym ludzi — mówi Maarja Kruusmaa, prof. biorobotyki i kierownik zespołu. „Oznacza to, że większość robotów nie ma dostępu do szerokiego zakresu niezwykle ważnych środowisk lądowych, w tym terenów podmokłych, bagien, bagien przybrzeżnych, estuariów rzek i pól, które występują obficie w naturze.
Simon Godon, doktorant w Centrum Biorobotyki TalTech, połączył swoje obserwacje na farmie bydła swoich rodziców w Berry we Francji ze swoją wiedzą z zakresu inżynierii mechanicznej i biorobotyki, proponując zaawansowane technologicznie kopyta dla robotów, które zdradziły duże zalety, zwłaszcza podczas chodzenia po błocie.
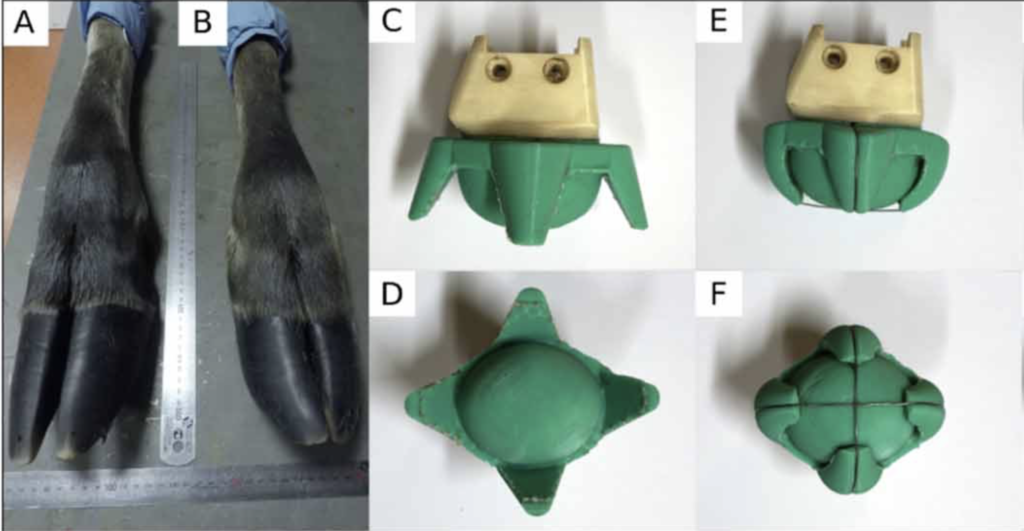
Eksperymenty fizyczne z prawdziwymi stopami łosia w warunkach laboratoryjnych wykazały, że tak właśnie jest. Podczas wchodzenia i wychodzenia z błota rozdzielone kopyta łosia rozszerzają się i kurczą, zwiększając i zmniejszając w ten sposób powierzchnię styku. Największą zaletą nie jest jednak zwiększona powierzchnia, ale sposób, w jaki rozdzielone kopyta łamią siłę ssącą, gdy są wyciągane z błota.
Odkryliśmy, że kopyto łosia zachowuje się podobnie do przyssawki, tak jakbyśmy wsadzili paznokieć pod jego powierzchnię i przełamali siłę ssącą – wyjaśnia Godon. Błoto działa podobnie jak mokra płytka w łazience, tworząc ssanie pod stopami zwierzęcia, co utrudnia wyciągnięcie nogi. Ruch kopyt rozbija to napięcie.
Kopyta nie tylko sprawiają, że ruch jest szybszy i bardziej energooszczędny, ale także pomagają uniknąć sytuacji śmiertelnych, gdy zwierzę zapada się zbyt głęboko, utyka i umiera.
Naukowcy zaprojektowali silikonowe stopy dla robota z nogami, mające na celu odtworzenie tego samego zachowania. Testy na błotnistych powierzchniach wykazały, że prosta modyfikacja stóp robota zmniejsza zapadanie się robota i siłę ssania o połowę, podczas gdy zużycie energii przez robota zostało zmniejszone nawet o 70%.
Warto zauważyć, że badacze nie znaleźli jeszcze żadnych wad zmodyfikowanych stóp robo-łosia.
Spekulujemy, że wręcz przeciwnie, rozdzielone kopyta mogą mieć nawet zalety na nierównym terenie, dając robotowi lub zwierzęciu dodatkową stabilność – mówi prof. Kruusmaa.
Więcej o badaniach znajduje się TU.
Źródło: materiały Estońskiej Rady ds. Badań Naukowych, zdjęcie w tekście: materiały prasowe, zdjęcie zajawka: Freepik



Zostaw komentarz
You must be logged in to post a comment.