W przyszłości dostarczanie leków dokładnie tam, gdzie są potrzebne w ciele, może być zadaniem miniaturowych robotów. Nie małych metalowych humanoidalnych lub nawet bio-naśladujących robotów, a raczej maleńkich kulkach przypominających bańki.
Takie roboty musiałyby spełniać długą i wymagającą listę wymagań. Na przykład musiałyby przetrwać w płynach ustrojowych, takich jak kwasy żołądkowe, i być kontrolowane, aby można je było precyzyjnie kierować do docelowych miejsc. Muszą również uwalniać swój ładunek medyczny tylko wtedy, gdy dotrą do celu, a następnie być wchłaniane przez organizm bez powodowania szkód.
Teraz mikroroboty, które spełniają wszystkie te wymagania, zostały opracowane przez zespół kierowany przez Caltech. Używając botów, zespół z powodzeniem dostarczył terapie, które zmniejszyły rozmiar guzów pęcherza u myszy. Artykuł opisujący pracę ukazał się w czasopiśmie Science Robotics.
Zaprojektowaliśmy jedną platformę, która może rozwiązać wszystkie te problemy – mówi Wei Gao, profesor inżynierii medycznej na Caltech, badacz w Heritage Medical Research Institute i współautor nowego artykułu na temat robotów, które zespół nazywa bioresorbowalnymi akustycznymi mikrorobotami (BAM).
Zamiast podawać lek do organizmu i pozwalać mu rozprzestrzeniać się wszędzie, teraz możemy kierować nasze mikroroboty bezpośrednio do miejsca występowania guza i uwalniać lek w sposób kontrolowany i wydajny – mówi Gao.
Koncepcja mikro- lub nanorobotów nie jest nowa. Ludzie opracowywali ich wersje przez ostatnie dwie dekady. Jednak jak dotąd ich zastosowania w systemach żywych były ograniczone, ponieważ niezwykle trudno jest precyzyjnie poruszać obiektami w złożonych biopłynach, takich jak krew, mocz lub ślina, mówi Gao. Roboty muszą być również biokompatybilne i bioresorbowalne, co oznacza, że nie pozostawiają w organizmie niczego toksycznego.
Opracowane przez Caltech mikroroboty to sferyczne mikrostruktury wykonane z hydrożelu zwanego diakrylanem poli(glikolu etylenowego). Hydrożele to materiały, które początkowo występują w postaci ciekłej lub żywicy i stają się stałe, gdy sieć polimerów w nich zawartych ulega usieciowaniu lub twardnieje. Taka struktura i skład umożliwiają hydrożelom zatrzymywanie dużych ilości płynu, dzięki czemu wiele z nich jest biokompatybilnych. Metoda wytwarzania addytywnego umożliwia również zewnętrznej kuli przenoszenie ładunku terapeutycznego do miejsca docelowego w ciele.
Aby opracować recepturę hydrożelu i wykonać mikrostruktury, Gao zwrócił się do Julii R. Greer z Caltech, profesora nauk materiałowych, mechaniki i inżynierii medycznej im. Rubena F. i Donny Mettler, dyrektora Fletcher Jones Foundation w Kavli Nanoscience Institute i współautora korespondencyjnego artykułu. Grupa Greer specjalizuje się w litografii polimeryzacji dwufotonowej (TPP), technice, która wykorzystuje niezwykle szybkie impulsy światła lasera podczerwonego do selektywnego usieciowania światłoczułych polimerów zgodnie z określonym wzorem w bardzo precyzyjny sposób. Technika ta umożliwia budowanie struktury warstwa po warstwie, w sposób przypominający drukarki 3D, ale w tym przypadku z dużo większą precyzją i złożonością formy.
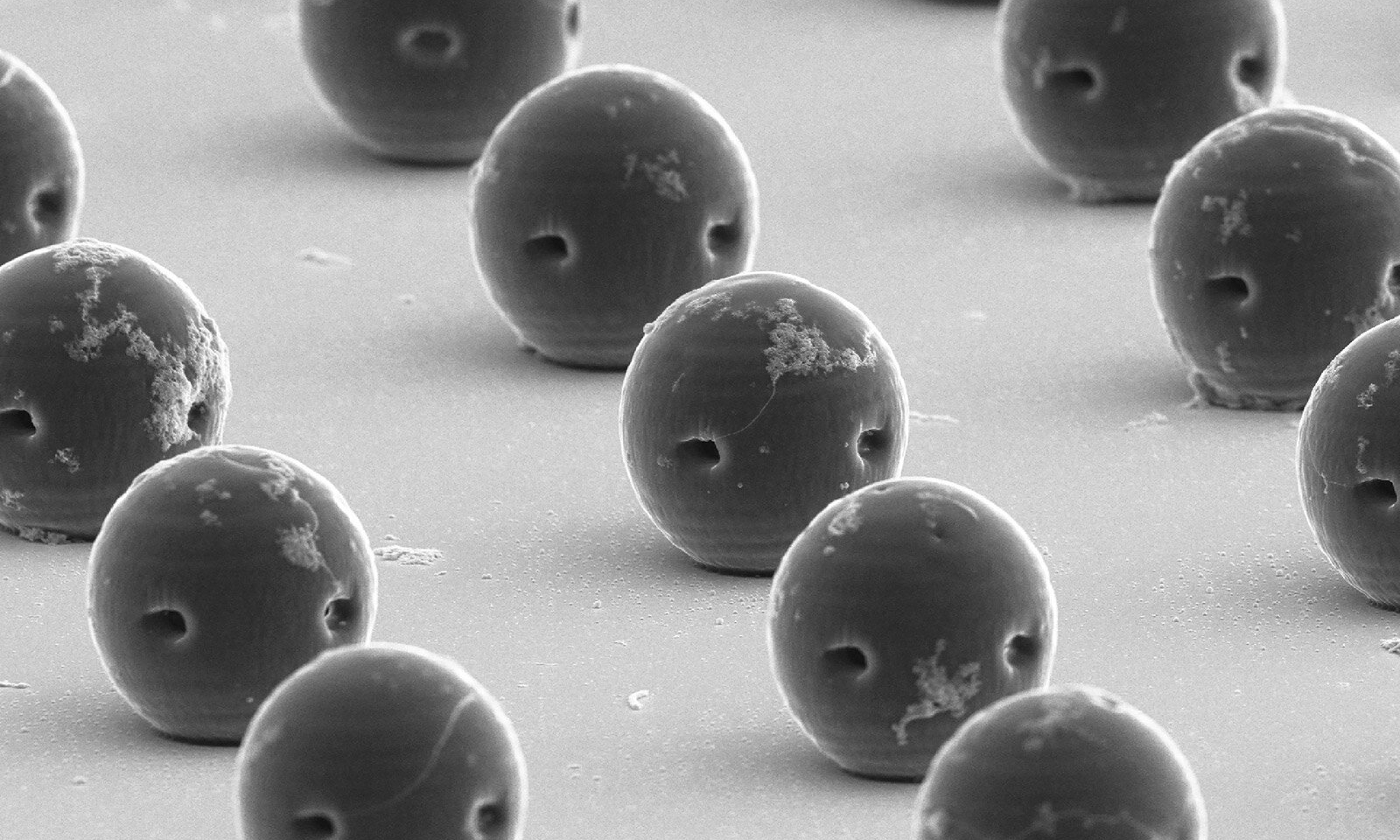
Zespołowi Greera udało się „napisać” lub wydrukować mikrostruktury o średnicy około 30 mikronów, co odpowiada średnicy ludzkiego włosa.
Ten konkretny kształt, ta kula, jest bardzo skomplikowany do napisania” — mówi Greer. „Trzeba znać pewne sztuczki, aby kule nie zapadły się same w sobie. Udało nam się nie tylko zsyntetyzować żywicę, która zawiera całą biofunkcjonalizację i wszystkie niezbędne medycznie elementy, ale także napisać je w precyzyjnym kulistym kształcie z niezbędną wnęką”.
W swojej ostatecznej formie mikroroboty zawierają magnetyczne nanocząsteczki i terapeutyczny lek w zewnętrznej strukturze kulek. Magnetyczne nanocząsteczki pozwalają naukowcom kierować roboty do pożądanej lokalizacji za pomocą zewnętrznego pola magnetycznego. Gdy roboty dotrą do celu, pozostają w tym miejscu, a lek biernie dyfunduje.
Gao i współpracownicy zaprojektowali zewnętrzną część mikrostruktury tak, aby była hydrofilowa – to znaczy przyciągana do wody – co zapewnia, że poszczególne roboty nie będą się ze sobą zlepiać podczas przemieszczania się przez ciało. Jednak wewnętrzna powierzchnia mikrorobota nie może być hydrofilowa, ponieważ musi zatrzymać pęcherzyk powietrza, a pęcherzyki łatwo się zapadają lub rozpuszczają.
Aby zbudować hybrydowe mikroroboty, które są zarówno hydrofilowe na zewnątrz, jak i hydrofobowe lub odpychające wodę wewnątrz, naukowcy opracowali dwuetapową modyfikację chemiczną. Najpierw przyłączyli do hydrożelu długie łańcuchy cząsteczek węgla, dzięki czemu cała struktura stała się hydrofobowa. Następnie naukowcy zastosowali technikę zwaną trawieniem plazmą tlenową, aby usunąć część tych długich łańcuchów struktur węglowych z wnętrza, pozostawiając zewnętrzną część hydrofobową, a wewnętrzną hydrofilową.
„To była jedna z kluczowych innowacji tego projektu” — mówi Gao, który jest również stypendystą Ronalda i JoAnne Willens. „Ta asymetryczna modyfikacja powierzchni, gdzie wnętrze jest hydrofobowe, a zewnętrze hydrofilowe, naprawdę pozwala nam używać wielu robotów i nadal zatrzymywać pęcherzyki przez dłuższy czas w biopłynach, takich jak mocz lub surowica”.
Zespół wykazał, że dzięki tej metodzie bąbelki mogą utrzymywać się nawet kilka dni, podczas gdy w przeciwnym razie byłoby to możliwe tylko przez kilka minut.
Obecność uwięzionych pęcherzyków jest również kluczowa dla poruszania robotów i śledzenia ich za pomocą obrazowania w czasie rzeczywistym. Na przykład, aby umożliwić napęd, zespół zaprojektował mikrorobotyczną kulę tak, aby miała dwa cylindryczne otwory — jeden na górze i drugi z boku. Gdy roboty są wystawione na działanie pola ultradźwiękowego, pęcherzyki wibrują, powodując, że otaczający płyn wypływa z robotów przez otwór, napędzając roboty przez płyn. Zespół Gao odkrył, że użycie dwóch otworów dało robotom możliwość poruszania się nie tylko w różnych lepkich biopłynach, ale także z większą prędkością, niż można osiągnąć za pomocą jednego otworu.
W każdej mikrostrukturze uwięziony jest pęcherzyk przypominający jajko, który służy jako doskonały środek kontrastowy do obrazowania ultradźwiękowego, umożliwiając monitorowanie robotów w czasie rzeczywistym in vivo . Zespół opracował sposób śledzenia mikrorobotów podczas ich przemieszczania się do celów z pomocą ekspertów w dziedzinie obrazowania ultradźwiękowego Mikhaila Shapiro, profesora inżynierii chemicznej i inżynierii medycznej Maxa Delbrucka na Caltech, badacza w Howard Hughes Medical Institute; współautora korespondencyjnego Di Wu, naukowca i dyrektora DeepMIC Center w Caltech; oraz współautora korespondencyjnego Qifa Zhou, profesora okulistyki i inżynierii biomedycznej na USC.
Ostatni etap rozwoju obejmował testowanie mikrorobotów jako narzędzia do dostarczania leków myszom z guzami pęcherza moczowego. Naukowcy odkryli, że cztery dostawy leków dostarczonych przez mikroroboty w ciągu 21 dni były skuteczniejsze w zmniejszaniu guzów niż leki niedostarczone przez roboty.
Uważamy, że jest to bardzo obiecująca platforma do dostarczania leków i precyzyjnej chirurgii — mówi Gao. Patrząc w przyszłość, moglibyśmy ocenić wykorzystanie tego robota jako platformy do dostarczania różnych typów ładunków terapeutycznych lub środków na różne schorzenia. A w dłuższej perspektywie mamy nadzieję przetestować to na ludziach.
Źródło: materiały prasowe Caltech, zdjęcie zajawka: Hong Han/Caltech



Zostaw komentarz
You must be logged in to post a comment.