Inżynierowie z Uniwersytetu w Manchesterze odkryli tajemnice projektowania robota zdolnego skoczyć na odległość 200 metrów – wyżej niż jakikolwiek inny robot skaczący zaprojektowany do tej pory.
Korzystając z połączenia matematyki, symulacji komputerowych i eksperymentów laboratoryjnych, badacze odkryli, jak zaprojektować robota o optymalnym rozmiarze, kształcie i rozmieszczeniu części, co umożliwi mu skakanie wystarczająco wysoko, aby pokonywać przeszkody wielokrotnie większe od niego.
Obecny najwyżej skaczący robot może osiągnąć wysokość do 33 metrów, co stanowi równowartość 110-krotności jego własnego rozmiaru. Teraz badacze odkryli, jak zaprojektować robota, który będzie w stanie skoczyć w powietrze na wysokość ponad 120 metrów (lub 200 metrów na Księżycu) – to ponad dwukrotnie więcej niż wysokość wieży Big Bena.
Postęp ten, opisany w czasopiśmie Mechanism and Machine Theory, zrewolucjonizuje zastosowania, od eksploracji planet, przez ratownictwo w przypadku katastrof, po obserwację niebezpiecznych lub niedostępnych przestrzeni.
Współautor, dr John Lo, pracownik naukowy w dziedzinie robotyki kosmicznej na Uniwersytecie w Manchesterze, powiedział: „Roboty są tradycyjnie projektowane tak, aby poruszać się na kółkach lub używać nóg do chodzenia, ale skakanie zapewnia skuteczny sposób podróżowania po miejscach, w których teren jest bardzo nierówna lub gdzie występuje wiele przeszkód, np. w jaskiniach, przez lasy, nad głazami, a nawet na powierzchni innych planet w kosmosie.”
„Chociaż istnieją już roboty do skakania, projektowanie tych maszyn do skakania wiąże się z kilkoma dużymi wyzwaniami, a głównym z nich jest skakanie wystarczająco wysoko, aby pokonać duże i skomplikowane przeszkody. Nasz projekt radykalnie poprawiłby efektywność energetyczną i wydajność robotów skaczących napędzanych sprężynami”.
Naukowcy odkryli, że tradycyjne roboty skaczące często startują, zanim w pełni uwolnią zgromadzoną energię sprężyny, co skutkuje nieefektywnymi skokami i ograniczeniem ich maksymalnej wysokości. Odkryli również, że marnowali energię, poruszając się na boki lub obracając się, zamiast poruszać się prosto w górę.
Nowe projekty muszą skupiać się na usuwaniu tych niepożądanych ruchów, przy jednoczesnym zachowaniu niezbędnej wytrzymałości i sztywności konstrukcyjnej.
Współautor dr Ben Parslew, starszy wykładowca w dziedzinie inżynierii lotniczej, tłumaczy: „Było wiele pytań, na które należało odpowiedzieć i podjąć decyzje dotyczące kształtu robota, na przykład czy powinien mieć nogi, dzięki którym mógłby odpychać się od ziemi jak kangur, czy czy powinien przypominać bardziej zaprojektowany tłok z gigantyczną sprężyną? Czy powinien to być prosty, symetryczny kształt, taki jak diament, czy może powinien to być coś bardziej zakrzywionego i organicznego? Następnie, po podjęciu tej decyzji, musimy pomyśleć o wielkości robota – małe roboty są lekkie i zwinne, ale duże roboty mogą przenosić większe silniki, aby wykonywać mocniejsze skoki, więc czy najlepsza opcja będzie gdzieś pośrodku?
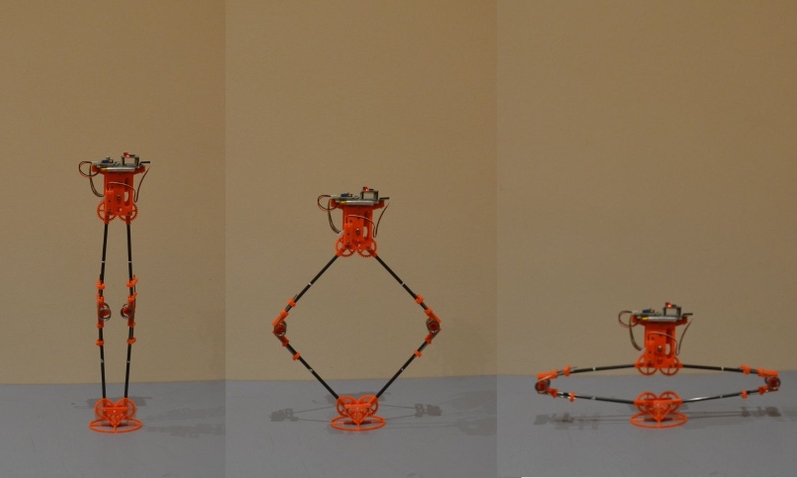
„Nasze przeprojektowania konstrukcyjne powodują redystrybucję masy komponentów robota u góry i zwężenie konstrukcji w części dolnej. Lżejsze nogi w kształcie pryzmatu i zastosowanie sprężyn, które się tylko rozciągają, to właściwości, które, jak wykazaliśmy, poprawiają wydajność i, co najważniejsze, efektywność energetyczną skaczącego robota”.
Chociaż badacze znaleźli praktyczną opcję projektowania, która znacznie poprawia wydajność, ich następnym celem jest kontrolowanie kierunku skoków i odkrycie, w jaki sposób wykorzystać energię kinetyczną powstającą podczas lądowania, aby zwiększyć liczbę skoków, które robot może wykonać w jednym opłata. Zajmą się także badaniem bardziej kompaktowych konstrukcji na potrzeby misji kosmicznych, dzięki którym robot będzie łatwiejszy w transporcie i rozmieszczaniu na Księżycu.
Źródło tekstu, zdjęcia i video: materiały Uniwersytetu Manchesterskiego



Zostaw komentarz
You must be logged in to post a comment.