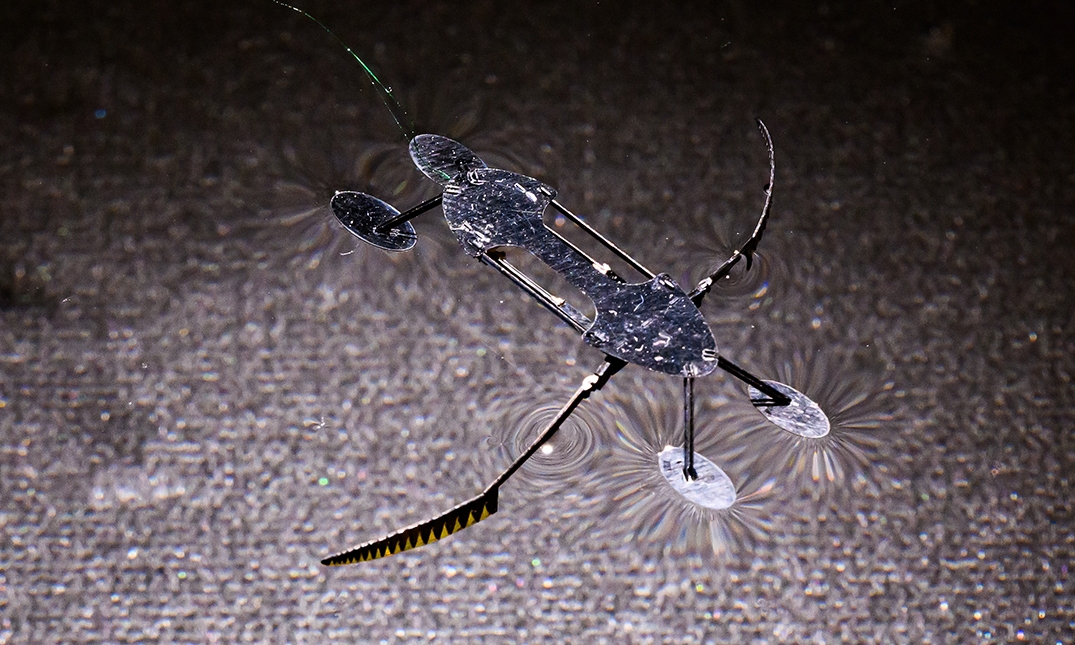
Takie miniaturowe roboty będą mogły pewnego dnia zostać wykorzystane do prac w takich obszarach, jak sztuczne zapylanie, poszukiwania i ratownictwo, monitorowanie środowiska, mikroprodukcja czy chirurgia wspomagana robotem. Donosząc o swojej pracy podczas Międzynarodowej Konferencji na temat inteligentnych robotów i systemów zorganizowanej przez IEEE Robotics i Automation Society autorzy wynalazku podali, że minirobak waży osiem miligramów, podczas gdy nartnik waży 55 miligramów. Oba mogą poruszać się z prędkością około sześciu milimetrów na sekundę.
– To dużo w porównaniu z innymi mikrorobotami tej skali, chociaż wciąż pozostaje w tyle za ich biologicznymi krewnymi – powiedział Conor Trygstad, doktorant w Szkole Inżynierii Mechanicznej i Materiałowej oraz główny autor pracy. Mrówka zazwyczaj waży do pięciu miligramów i może poruszać się z prędkością prawie metra na sekundę.
Kluczem do maleńkich robotów są ich maleńkie siłowniki, które wprawiają roboty w ruch. Trygstad zastosował nową technikę produkcyjną, aby zminiaturyzować siłownik do wielkości poniżej miligrama, najmniejszego, jaki kiedykolwiek wyprodukowano.
„Siłowniki są najmniejszymi i najszybszymi, jakie kiedykolwiek opracowano dla mikrorobotyki” – powiedział Néstor O. Pérez-Arancibia, profesor nadzwyczajny Flaherty na wydziale inżynierii w Szkole Inżynierii Mechanicznej i Materiałowej WSU, który kierował projektem.
W siłowniku zastosowano materiał zwany stopem z pamięcią kształtu, który może zmieniać kształty po podgrzaniu. Nazywa się ją „pamięcią kształtu”, ponieważ zapamiętuje, a następnie powraca do swojego pierwotnego kształtu. W przeciwieństwie do typowego silnika, który poruszałby robotem, stopy te nie mają żadnych ruchomych części ani elementów wirujących.

„Są bardzo sprawne mechanicznie” – stwierdził Trygstad. „Opracowanie bardzo lekkiego siłownika otwiera nowe obszary mikrorobotyki”.
Stopy z pamięcią kształtu nie są powszechnie stosowane w ruchach robotów na dużą skalę, ponieważ są zbyt wolne. Jednak w przypadku robotów WSU siłowniki są wykonane z dwóch maleńkich drutów ze stopu z pamięcią kształtu i średnicy 1/1000 cala. Przy niewielkim natężeniu prądu przewody można łatwo nagrzać i schłodzić, co pozwala robotom machać płetwami lub poruszać nogami z prędkością do 40 razy na sekundę. We wstępnych testach siłownik był również w stanie unieść ponad 150-krotność własnego ciężaru.
W porównaniu z innymi technologiami stosowanymi do wprawiania robotów w ruch, technologia SMA również wymaga jedynie bardzo małej ilości energii elektrycznej lub ciepła, aby wprawić je w ruch.
„System SMA wymaga do zasilania znacznie mniej wyrafinowanych systemów” – powiedział Trygstad.
Trygstad, zapalony wędkarz muchowy, od dawna obserwuje nartniki i chciałby dalej badać ich ruchy. Podczas gdy robot nartnika WSU, aby się poruszać, wykonuje płaski, trzepoczący ruch, naturalny owad wykonuje bardziej efektywny ruch wiosłowania nogami, co jest jednym z powodów, dla których prawdziwy obiekt może poruszać się znacznie szybciej.
Naukowcy chcieliby skopiować innego owada i opracować robota przypominającego nartnika, który będzie mógł poruszać się po powierzchni wody lub tuż pod nią. Pracują również nad wykorzystaniem małych baterii lub spalania katalitycznego, aby ich roboty były w pełni autonomiczne i niezależne od źródła zasilania.
Źródło: materiały Uniwersytetu Stanowego w Waszyngtonie; zdjęcie zajawka: Bob Hubner/WSU Photo Services



Zostaw komentarz
You must be logged in to post a comment.