Podwodne roboty do sprzątania dna mórz i oceanów są w większości nieporęczne i pokraczne. Nie są w stanie badać i pobierać próbek w złożonych i nieustrukturyzowanych środowiskach, są też hałaśliwe z powodu silników lub pomp hydraulicznych. Jest jednak pomysł, jak to zmienić.
Aby uzyskać bardziej odpowiedni projekt, naukowcy z Instytutu Systemów Inteligentnych im. Maxa Plancka (MPI-IS) w Stuttgarcie poszukali inspiracji w naturze. Skonfigurowali inspirowanego meduzami, wszechstronnego, energooszczędnego i prawie bezgłośnego robota wielkości dłoni. Jellyfish-Bot to efekt współpracy działów Inteligencji Fizycznej i Materiałów Robotycznych.
Do zbudowania robota zespół wykorzystał siłowniki elektrohydrauliczne, przez które przepływa prąd. Siłowniki służą jako sztuczne mięśnie napędzające robota. Mięśnie te otaczają poduszki powietrzne oraz miękkie i sztywne elementy, które stabilizują robota i czynią go wodoodpornym. W ten sposób wysokie napięcie przepływające przez siłowniki nie może stykać się z otaczającą wodą. Zasilacz okresowo dostarcza prąd przez cienkie przewody, powodując kurczenie się i rozszerzanie mięśni. Pozwala to robotowi pływać z gracją i tworzyć wiry pod swoim ciałem.
– Kiedy meduza płynie w górę, może uwięzić przedmioty na swojej drodze, tworząc prądy wokół swojego ciała. W ten sposób może również zbierać składniki odżywcze. Nasz robot również krąży. Ta funkcja jest przydatna do zbierania przedmiotów, takich jak odpady. Może następnie transportować śmieci na powierzchnię, gdzie można je później poddać recyklingowi. Jest również w stanie zbierać delikatne próbki biologiczne, takie jak ikra ryb. Tymczasem nie ma negatywnego wpływu na otaczające środowisko. Interakcja z gatunkami wodnymi jest łagodna i prawie bezgłośna – wyjaśnia Tianlu Wang z Zakładu Inteligencji Fizycznej MPI-IS, pierwszy autor publikacji*.
Jej współautor, Hyeong-Joon Joo z działu Robotic Materials Department, kontynuuje: – Szacuje się, że 70 procent śmieci morskich opada na dno morskie. Tworzywa sztuczne stanowią ponad 60 procent tych śmieci, a ich degradacja zajmuje setki lat. dostrzegli pilną potrzebę opracowania robota do manipulowania przedmiotami, takimi jak śmieci, i przenoszenia ich w górę. Mamy nadzieję, że podwodne roboty będą pewnego dnia pomagać w oczyszczaniu naszych oceanów.
Meduzy-boty są w stanie przenosić i chwytać obiekty bez kontaktu fizycznego, działając samodzielnie lub w połączeniu z kilkoma innymi. Każdy robot działa szybciej niż inne porównywalne wynalazki, osiągając prędkość do 6,1 cm/s. Co więcej, Jellyfish-Bot wymaga jedynie niewielkiej mocy wejściowej, wynoszącej około 100 mW. I jest to bezpieczne dla ludzi i ryb, jeśli polimerowy materiał izolujący robota pewnego dnia zostanie rozerwany. Tymczasem hałasu robota nie da się odróżnić od poziomu tła. W ten sposób Jellyfish-Bot delikatnie oddziałuje na otoczenie, nie zakłócając go — podobnie jak jego naturalny odpowiednik.
Robot składa się z kilku warstw: niektóre usztywniają robota, inne służą do utrzymywania go na powierzchni lub izolacji. Kolejna warstwa polimeru działa jak pływająca powłoka. Elektrycznie zasilane sztuczne mięśnie znane jako HASEL są osadzone w środku różnych warstw. HASEL to plastikowe woreczki wypełnione płynnym dielektrykiem, częściowo pokryte elektrodami. Przyłożenie wysokiego napięcia do elektrody ładuje ją dodatnio, podczas gdy otaczająca woda jest naładowana ujemnie. Generuje to siłę między dodatnio naładowaną elektrodą a ujemnie naładowaną wodą, która popycha olej wewnątrz woreczków tam iz powrotem, powodując kurczenie się i rozluźnianie woreczków – przypominając prawdziwy mięsień. HASEL wytrzymują wysokie naprężenia elektryczne generowane przez naładowane elektrody i są chronione przed wodą przez warstwę izolacyjną. To jest ważne,
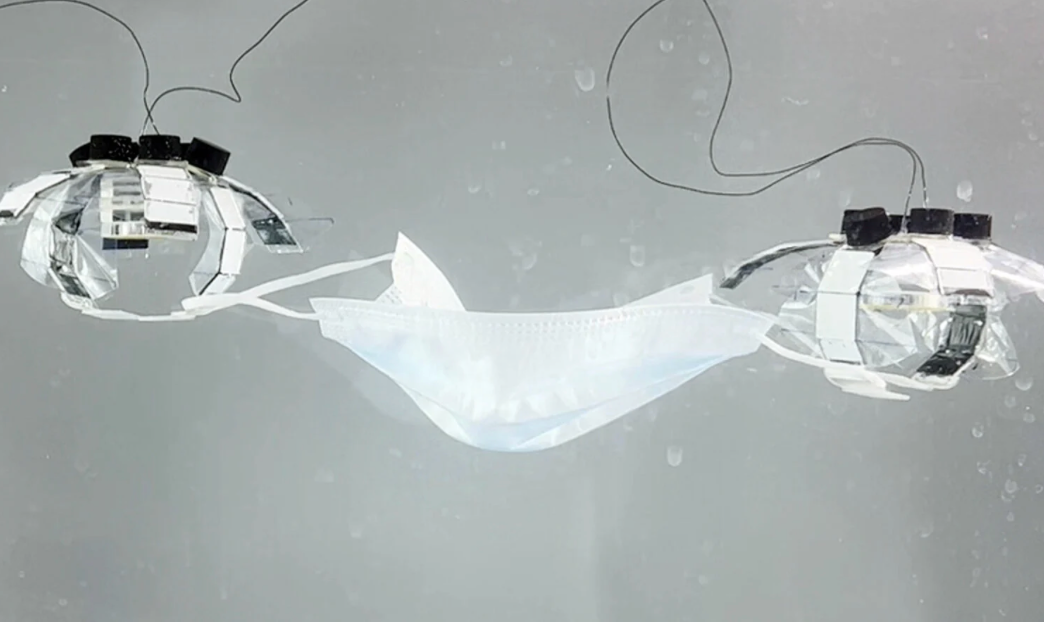
– Osiągnęliśmy chwytanie przedmiotów sprawiając, że cztery ramiona działały jak śmigło, a dwa pozostałe jako chwytak lub uruchamialiśmy tylko podzestaw ramion, aby sterować robotem w różnych kierunkach. Przyjrzeliśmy się również, jak zadziała kolektyw kilku robotów. W tym momencie nasz Jellyfish-Bot potrzebuje kabla. Jest to wada, jeśli naprawdę chcemy go pewnego dnia użyć w oceanie – mówi Hyeong-Joon Joo.
Być może przewody zasilające roboty wkrótce odejdą do lamusa.
– Naszym celem jest opracowanie robotów bezprzewodowych. Na szczęście udało nam się zrobić pierwszy krok w tym kierunku. Wprowadziliśmy wszystkie moduły funkcjonalne, takie jak bateria i części do komunikacji bezprzewodowej, aby umożliwić przyszłe manipulacje bezprzewodowe — kontynuuje Tianlu Wang. Zespół przymocował jednostkę wypornościową do górnej części robota oraz baterię i mikrokontroler do dolnej części. Następnie zabrali swój wynalazek na kąpiel w stawie kampusu Maxa Plancka w Stuttgarcie i mogli z powodzeniem nim kierować. Do tej pory nie udało im się jednak tak nakierować robota bezprzewodowego, aby zmienił kurs i popłynął w drugą stronę.
Zdjęcie zajawka: materiały prasowe Max Planck Institute



Zostaw komentarz
You must be logged in to post a comment.